COBOTSGUIDE
A COMPLETE GUIDE TO MAKING SENSE OF COLLABORATIVE ROBOTS
COBOTS 101



01 / DEFINITION
WHAT IS A COBOT?
02 / FUNCTION
WHAT DO COBOTS DO?
03 / USES
WHAT ARE COBOTS USED FOR?
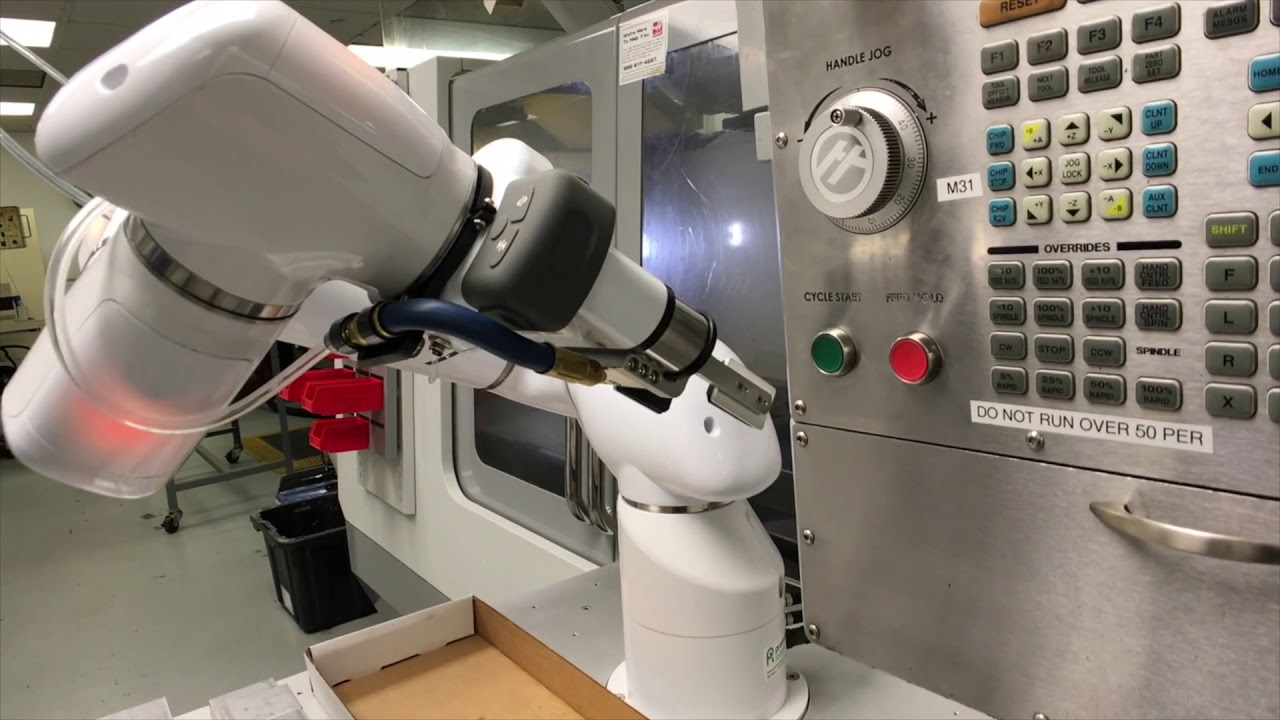
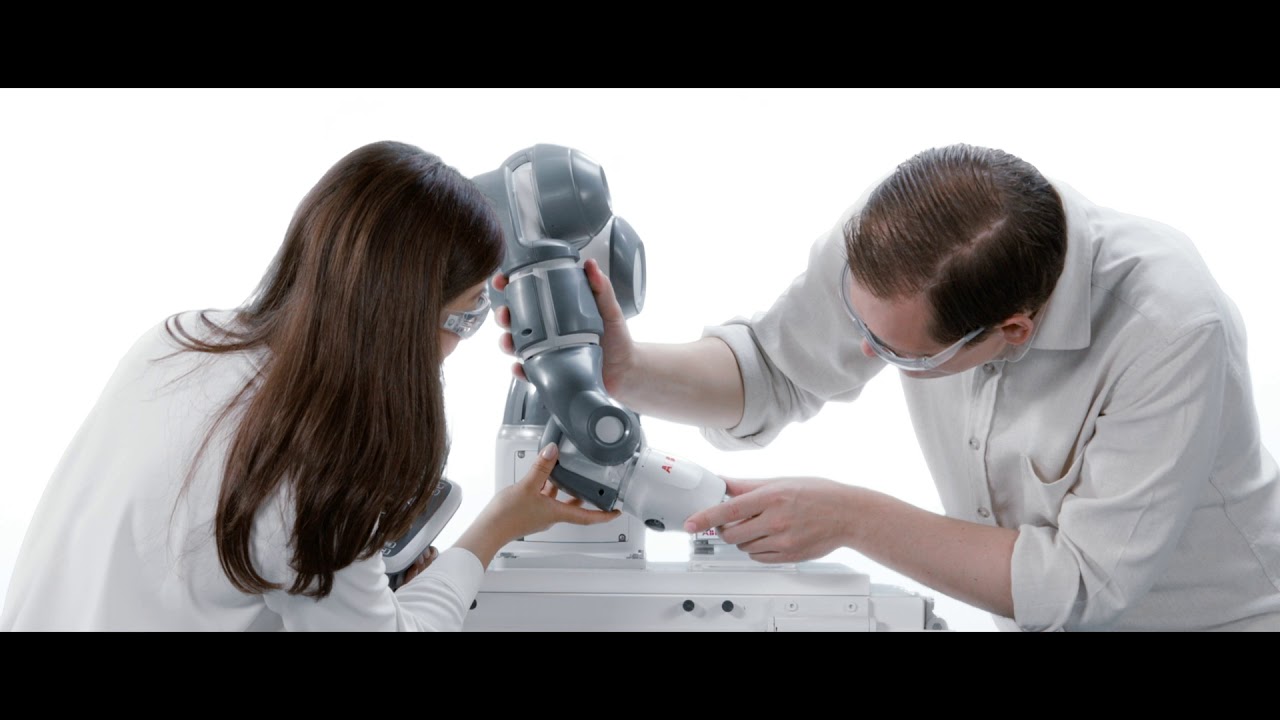
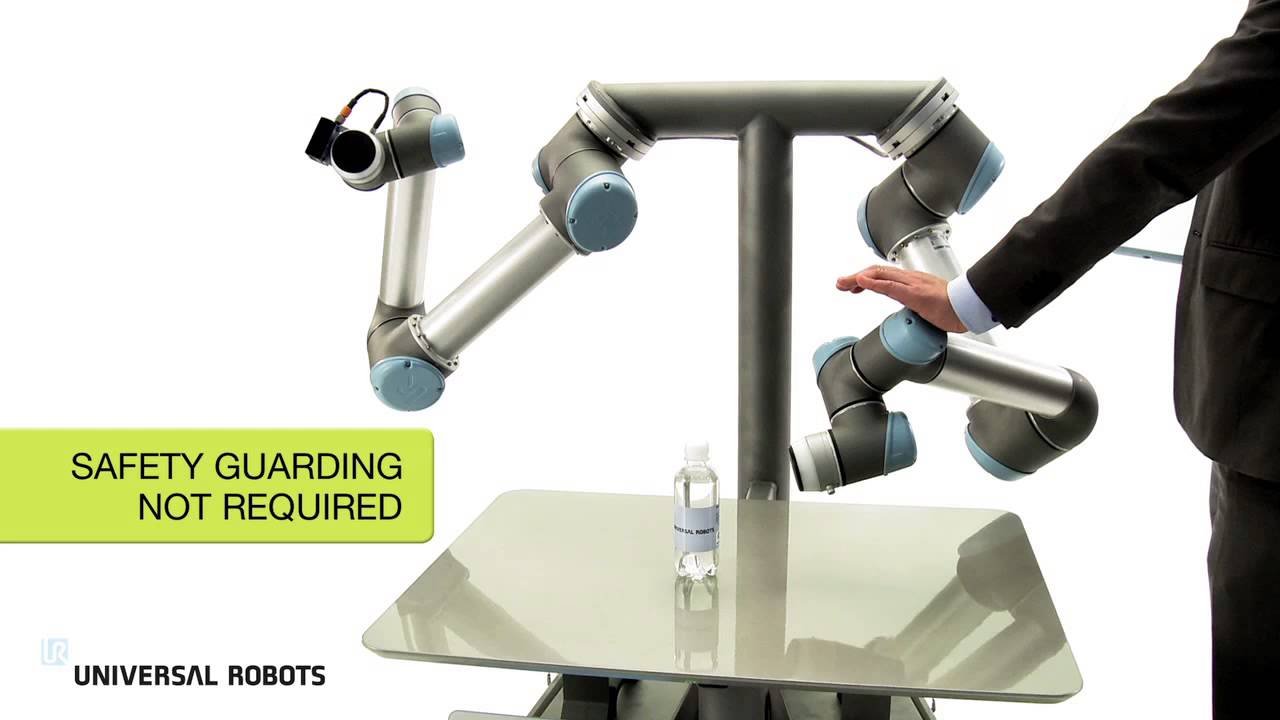
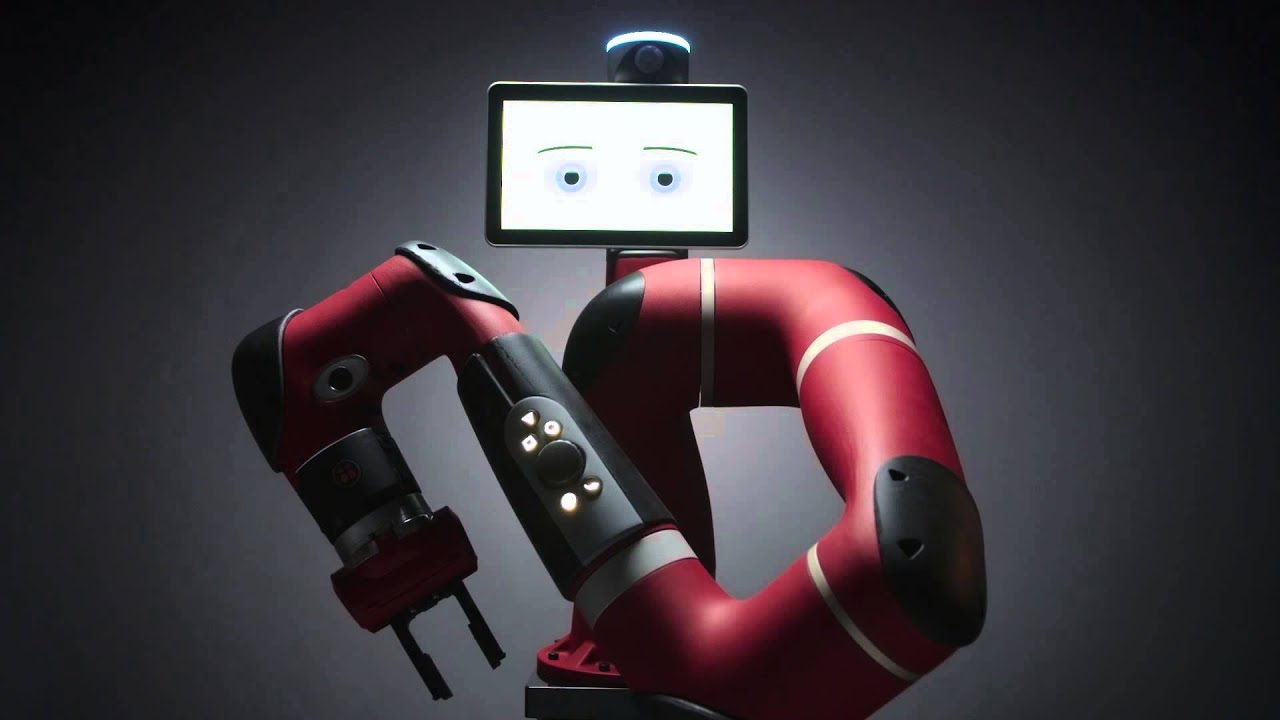
Cobots, or collaborative robots, are robots intended for direct human robot interaction within a shared space, or where humans and robots are in close proximity. Cobot applications contrast with traditional industrial robot applications in which robots are isolated from human contact.
A cobot is designed to work with people and not to replace people. Cobots are also called people-focused robots and can help people to make and refine the work they do easier. Dirty, unsafe, boring, monotonous or repetitive tasks can be performed by the robot so that employees can concentrate on other tasks.
Cobots can have many uses, from information robots in public spaces (an example of service robots) [5], logistics robots that transport materials within a building [6], to industrial robots that help automate unergonomic tasks such as helping people moving heavy parts, or machine feeding or assembly operations.